That requirement creates engineering challenges far beyond those found in conventional industry. Some blanket manifolds rise as high as 7.5 metres. Blanket shield blocks can weigh up to 4 tonnes, while divertor cassettes reach 9 tonnes.
Many of these components must be maneuvered through narrow openings, transported to locations around the vessel and positioned with extreme precision in an environment tightly packed with structures, cooling systems and plasma-facing components.
As a result, the robotic technologies being developed for today’s assembly activities are also laying the groundwork for future maintenance operations.
Building robots for fusion
To meet these requirements, ITER and its industrial partners are developing a new generation of heavy-duty robotics adapted specifically for fusion environments. “Many of the systems we use do not have any equivalent on the market today,” says Hery.
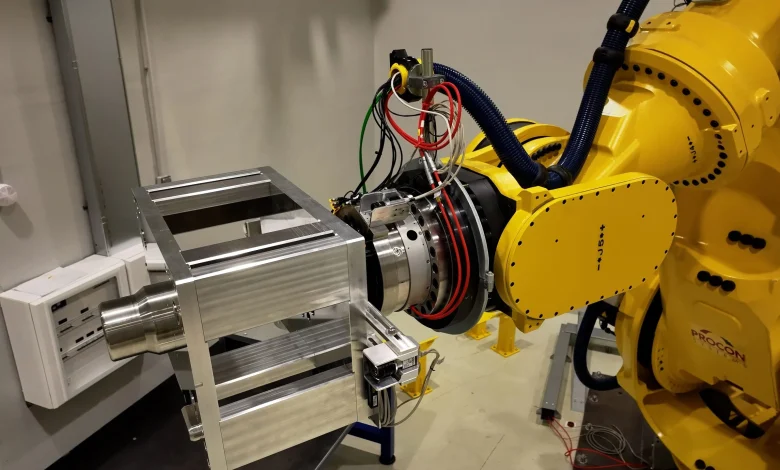
One example is the blanket assembly transporter, a long-reach robotic arm designed to install shield blocks and first-wall components inside the vessel (see the grey and black tool in the image, left). ITER is also developing specialized divertor assembly systems, remotely operated handling equipment and modular staging platforms that allow personnel to work safely alongside robotic operations during assembly phases.
The robots themselves are only part of the challenge. ITER engineers also need systems capable of something closer to human perception. “What a typical robot lacks is the sense of touch and the sense of vision,” says Hery.
That challenge has driven increasingly close collaboration between ITER, universities, startups and specialized industrial suppliers working together to adapt existing technologies—and in some cases invent entirely new ones—for fusion applications.
Giving robots sight
Physical reach and lifting capacity are only part of the problem. Operators also need robots that can perceive and react to their surroundings with extreme precision.
Workshop participant Olli Suominen described how machine-vision systems originally developed through academic research are now being adapted for ITER’s remote-handling operations.
Suominen began the work as a researcher at Tampere University in Finland before later joining the spin-off company Operview, which now collaborates with ITER on robotic vision technologies.
The challenge his team is trying to solve is deceptively simple. Operators controlling robots through camera feeds can generally see what they are doing, but precise alignment inside the vessel becomes far more difficult when handling large components over long distances.
Large robotic arms naturally deform under heavy loads. Once multi-tonne components are attached, the robot’s actual position can differ from its theoretical one. Vision systems help compensate for those deviations, allowing operators to align components precisely using optical markers laser-etched directly onto stainless steel surfaces (see the Pi-Tag fiducial marker above)—a solution that is compatible with vacuum and radiation environments.
“If you add cameras that will behave as your eyes and your sense of sight, then the robot can use references in its environment to know where it is exactly,” says Hery, adding that tests have shown the vision systems can achieve positioning precision of roughly 0.06 millimetres—smaller than the thickness of a human hair.
Giving robots touch
ITER engineers are also equipping assembly and maintenance robots with tactile feedback. Working with German measurement technology company HBK, ITER is developing specialized force-torque sensors that allow robotic systems to detect contact forces while manipulating shield blocks and first-wall components.
“These sensors are able to provide a sense of touch,” company representative Tim Ahlswede said during the workshop.
The sensors help the robot control system determine when a component has touched another surface, avoiding damaging collisions and adjusting the motion of the long robotic arm that extends into the vessel, according to Ahlswede. “When a heavy object is attached to a long arm it bends slightly, like a fishing rod when a fish is caught.”